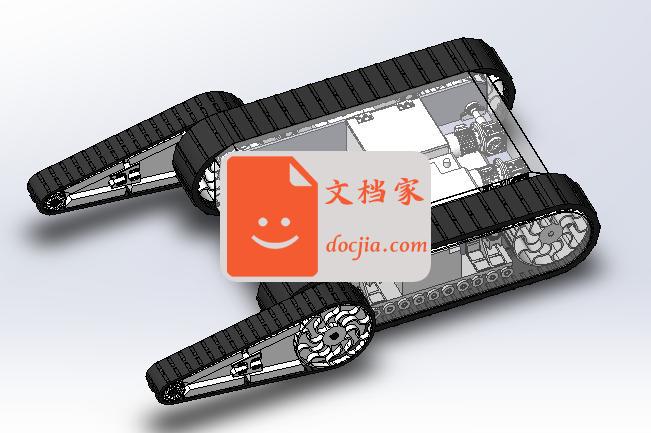
双摇臂履带底盘由SolidWorks软件设计,双摇臂履带底盘针对地震、火灾等灾后现场,分析国内外灾后救援机器人的研究现况,分析各类型救援越障机器人的优缺点,比较得出履带式机器人在复杂的环境中能较好地发挥机动性能,越过各种复杂地形,达到救援的目的。针对履带式机器人的体积大质量大的问题,提出对履带结构进行增加鳍状履带的方法,对可变形的履带进行研究,改善履带式机器人的弊端,提高其可行性和稳定性。
资源下载
下载价格20 金币
VIP免费
立即购买