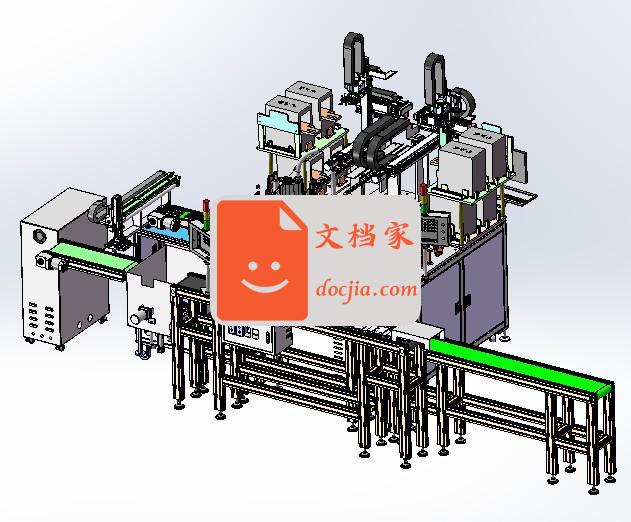
机器人抓取检测设备(含DFM) 2024-09-26 图纸模型 机器人抓取检测设备(含DFM)由SolidWorks软件设计,机器人抓取检测机动作流程:1.空Tray线体入料,模组抓取定位;1-1.载具有料线体流入设备;2.模组抓取载具进入定位;3.机械手抓取载具内产品放入旋转工位;4.旋转6工位检测产品5.完成后机械手抓取Tray内6.机械手抓取完成后产品放入Tray内7.Tray升降料仓储料,完成流出人工卸料; 资源下载资源下载立即下载 0 0 抓取机机器人检测机流水线测试机自动化设备非标设备