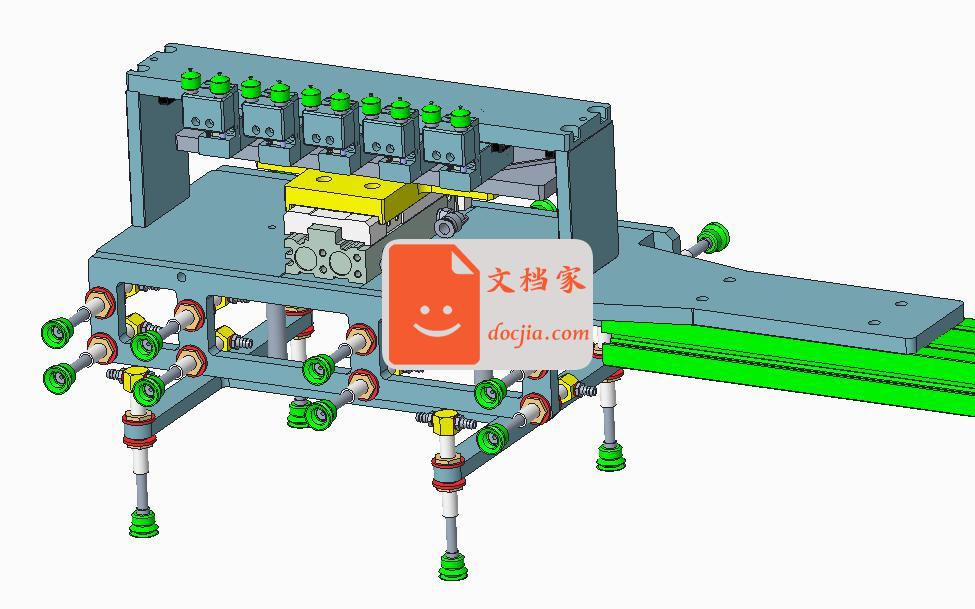
变距机器人手臂治具 2024-09-26 图纸模型 变距机器人手臂治具由ProE软件设计,变距机器人手臂治具–机器人手臂治具,通过翻转治具的4面,达到吸取不同工位的目的,减少了关节动作,节约了CT时间,提高了工作效率。–变距机构通过气动元件动作,将一模五穴的中心距从35mm变为50mm,从而节约了时间。 资源下载资源下载立即下载 0 0 变距机构机器人治具自动化设备非标设备