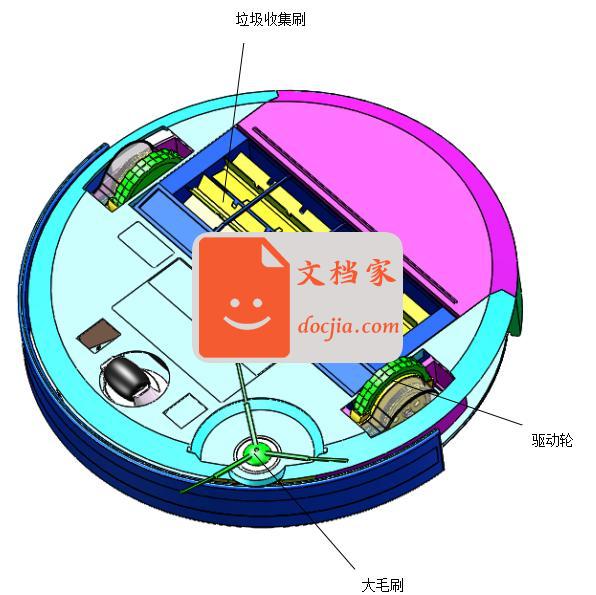
自主规划路径扫地机器人由SolidWorks软件设计,自主规划路径扫地机器人,主要由动力电池,5G模块碰撞传感器,清洁箱,垃圾盒,垃圾收集刷驱动轮,大毛刷组成。通过扫描形成室内地图,自主规划清扫路线,确保室内覆盖,自主充电,5G模块可以快速接收和发送信号。1,通过5G模块手机App远程控制,清扫模式切换,预约清扫,清扫设置区域,查看清扫效果。2,动力电池可以满足长续航,同时可以快速充电。3,将清洁箱中垃圾压缩储存到垃圾盒中。4,大毛刷清理较大垃圾和角落垃圾,垃圾收集刷清理小垃圾,以及将垃圾运输到垃圾箱中。5,由于有碰撞传感器,在遇到障碍物和房屋角落时可以避免撞击。
资源下载
下载价格20 金币
VIP免费
立即购买