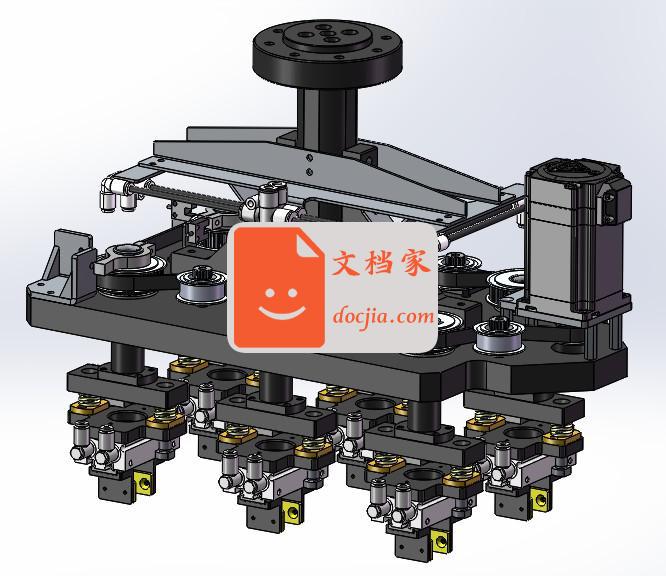
机器人末轴气动手爪由SolidWorks软件设计,本套图纸为机器人末轴手爪,采用2×3布局,旋转角度满足270度(电子限位270度,机械限位为280度),限位机构防止电机出现过冲。手爪的旋转采用同步带机构传动,传动比为1:2。手爪采用气立可机械夹爪性价比较高,手爪设计时,Z轴增加碰撞传感器容许Z轴出现3mm的冲击避免出现刚性碰撞。文件包含SLDASM/STP/IGS/EASM/X_T等格式便于使用。
资源下载
下载价格20 金币
VIP免费
立即购买