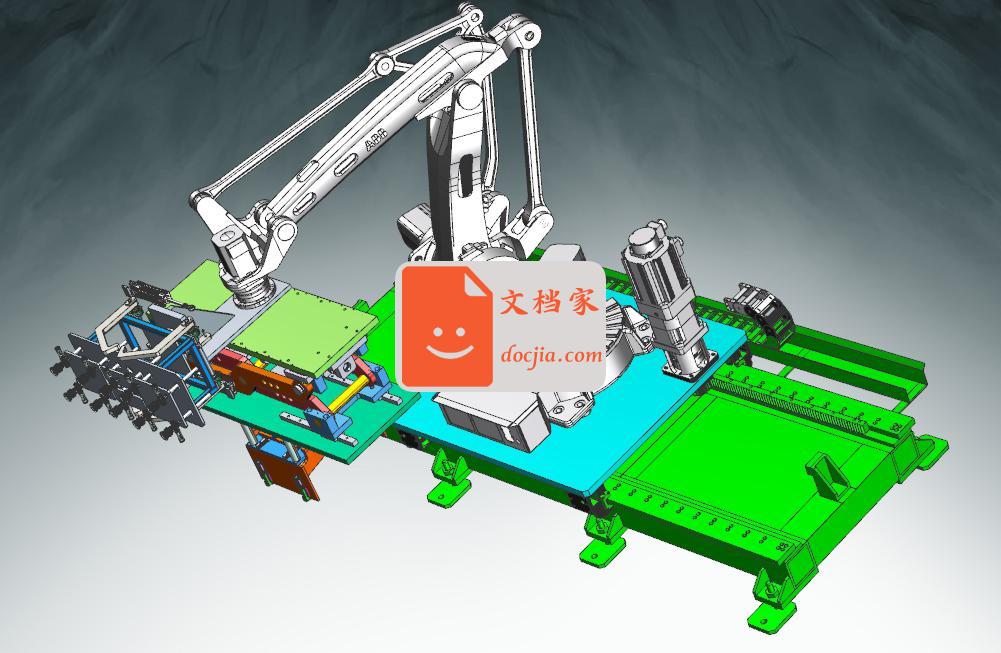
多功能机器抱具设计(真空吸取+平行夹抱+选址地轨)由SolidWorks软件设计,机器人抱具(真空吸取+平行夹抱+第七轴):此机器人抱具设计的非常精巧,由二副抓取机械构成整个抱具,真空吸收加上一副可伸缩的平行夹紧机构,机器人为六轴重负载210公斤机器人,并设计有第七轴以增加机器人的工作半径。欢迎下载参考设计,上传格式 XT.
资源下载
下载价格20 金币
VIP免费
立即购买